Біркелкі жедел түзу сызықты қозғалыс – тұрақты аралықтарда кез келген өзгерістер үшін дененің жылдамдығы бірдей, тұрақты модулімен және жеделдету бағыты қозғалысын, яғни онда қозғалыс …
a⃗ = const a → = const – жеделдету теңдеуі.
Жылдамдықтың анықтамасы бойынша a⃗ = Δυ⃗ Δt a → = Δυ → Δt.
Т0 = 0 кезінде дене ағымының жылдамдығы υ⃗ 0 υ → 0 тең, t – υ⃗ υ → уақытында болсын делік. Содан кейін, уақыт аралығы Т = Т-T0 = T Т = Т-t0 кезінде = T жылдамдығы Δυ⃗ = υ⃗ -υ⃗ 0 Δυ → = υ → -υ → 0 Осылайша, жеделдету a⃗ = υ⃗ -υ⃗ 0Δt⇒ бір → = υ өзгертілді → -y → 0Δt ⇒
υ⃗ = υ⃗ 0 + a⃗ ⋅t υ → = υ → 0 + a → ⋅t – жылдамдық теңдеуі.
Немесе болжамдарда
υx = υ0x + ax⋅t
υx = υ0x + ax⋅t
.
Кинематикалық шамалардың осы тәуелділіктері үш корпус үшін графикалық түрде құрастырылған (1-сурет).
Сурет. 1
Формулада жеделдету кестесі ax = f (t) 2-суретте көрсетілген, ал 3-суреттегі жылдамдық кестесі xx = f (t) – суретте көрсетілген.
Қозғалысты табу үшін жылдамдық диаграммасын қолданамыз (4-сурет).
Сурет. 2
Сурет. 3
Сурет. 4
Кішігірім уақыт аралығы Δt үшін, жылдамдықтағы өзгерістер ескерілмеуі мүмкін және жылдамдықты тұрақты деп санауға болады. Сонда уақыт Δt қозғалысы тар тығыз көлеңкелі жолақ ауданына тең болады. Кішкентай уақыт аралығындағы дене қозғалысының барлық уақытын бұзып, әрбір жеке уақыт аралығы үшін қозғалысты анықтадық, біз бұл қозғалыстарды жинақтаймыз. лимит уақыт аралығы Т = Т-T0 = T Т = Т-T0 = Т модулі проекциялық ауыстыру айтып келемiн трапеция ауданы сан тең.
Сондықтан,
Δrx = υ0x + υx2⋅t. (1) Δrx = υ0x + υx2⋅t. (1)
(1) мәнін келтіреміз: (1), аламыз:
Δrx = υ0x⋅t + ax⋅t22 Δrx = υ0x⋅t + axktt22 – проекциялардағы ығысу теңдеуі;
Δr⃗ = υ⃗ 0⋅t + a⃗ ⋅t22 Δr → = υ → 0⋅t + A → ⋅t22 – ауыстыру векторы теңдеуі.
X = x0 + Δrx x = x0 + Δrx екенін ескере отырып, бізде:
X = x0 + υ0x⋅t + ax⋅t22 х = x0 + υ0x⋅t + ax⋅t22 – біркелкі Үдемелі қозғалыс кинематикалық теңдеуі.
Оның векторлық көрінісі
r⃗ = r⃗ 0 + υ⃗ 0⋅t + a⃗ ⋅t22
R → = R → 0 + υ → 0⋅t + A → ⋅t22
.
Жылдамдық пен ауыстыру теңдеуінен уақытты жою:
Δrx = υ2x-υ20x2axθyx = υ20x + 2ax⋅Δrx ———— √. Δrx = υx2-υ0x22ax⇒υx = υ0x2 + 2ax⋅Δrx.
Өрнек (1) формуласын Δrx = ⟨υ⟩x⋅t Δrx = ⟨υ⟩x⋅t формуласымен салыстыру арқылы біз табамыз:
⟨υ⟩x = υ0x + υx2 ⟨υ⟩x = υ0x + υx2 – бұл біркелкі Үдемелі қозғалыс кезінде орташа жылдамдығының проекциясы.
Ауыстыру графикасы бастапқы жылдамдық пен жеделдіктің бағыттарына байланысты орналасатын парабол болып табылады (5-сурет).
Сурет. 5
Әдебиет
Аксенович Л.А. Жоғары мектептегі физика: теориясы. Тапсырмалар. Тест: Proc. Қоғамға қолжетімділікті қамтамасыз ететін мекемелер үшін жәрдемақы. орталар, білім / LA. Аксенович, Н.Н. Ракина, К.С. Фарино; Ed. K.S. Фарино. – Mn .: Adukaciya i vyhavanne, 2004. – C.10-11.
-
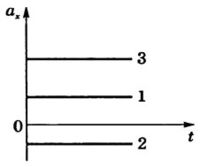
Рис. 2 -
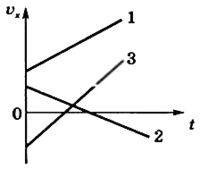
Рис. 3 -
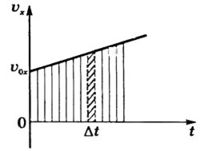
Рис. 4



Шамасын сипаттайтын бұл қозғалыс: үдеу a→ жылдамдығы, V,→, орын ауыстыру S→, координатасы x, t уақыты.
Теңдеуі жеделдету: a→=const→, проекция білікке x: ax=const.
Мұндай қозғалыс үдеуі a→ нүктесі өзгермейді.
Теңдеу жылдамдығы: V,→=V0→+a→t, проекция білікке x: Vx=V0x+axt.
Мұндай қозғалысы жылдамдығы V→ нүктесіне өзгереді желілік анық.
Теңдеу ауыстыру: S→=V0→t+a→t22, проекция білікке x: Sx=V0xt+axt22.
Мұндай қозғалысы орын ауыстыруы S→ нүктесіне өзгереді квадратично анық.
Координатное теңдеуі: x=x0+V0xt+axt22.
Үшін координаттар бойымен басқа ось формуласы ұқсас көрінеді.
Бірі жазылған жоғары арақатынас болады, тағы бірнеше өте пайдалы формулалар: Sx=V0x+Vx2t, әрине, Sx=Vx2−V0x22ax.
Жиі міндеттерді шешу үшін векторлық теңдеуі ыңғайлы түрінде ұсынуға векторлық үшбұрыш.
Бұл жағдайда, шешім теңдеулер жүйесі болады деген геометриялық шешімімен, ол бірқатар жағдайларда әлдеқайда шағын ошақтың болғаны дұрыс.
Байланысты тақырыптар
Кестесі равноускоренного қозғалыс
Механикалық қозғалыс
Жеделдету
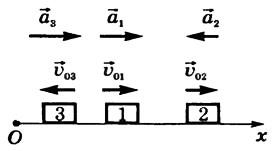
Жалпы жағдайда равноускоренным қозғалысын атайды мұндай қозғалыс, онда векторы жеделдету өзгеріссіз қалады модулі және бағыты. Мысал мұндай қозғалыс болып табылады қозғалыс тастың астына тастап кеткен кейбір бұрышпен көкжиекке (ауаның кедергісін). Траекториясының кез келген нүктесінде жеделдету тас сияқты жеделдету еркін құлау . Үшін кинематического сипаттау қозғалыс тас жүйесін координаттар ыңғайлы таңдау, сондықтан бір осі, мысалы, осі OY, бағытталған параллель вектору жеделдету. Сонда ығысу және бұралу тас ұсынуға болады сомасы ретінде екі қозғалысы – түзу сызықты равноускоренного қозғалыс осі бойымен OY және бірқалыпты түзу сызықты қозғалыстың перпендикулярлы бағытта, яғни осі бойымен OX (сур. 1.4.1).
Осылайша, зерттеу равноускоренного қозғалыс тегжейлі зерделеу тік сызықтық равноускоренного қозғалыс. Жағдайда түзу сызықты қозғалыстың жылдамдығы векторлары және жеделдету бағытталған бойымен түзу қозғалыс. Сондықтан, жылдамдығы υ және үдеу a проекцияда арналған қозғалыс бағыты ретінде қарастыруға болады алгебралық шамалар.
Сурет 1.4.1.
Векторлардың проекциялары жылдамдығы мен жеделдету негізінде координаталық ось. ax = 0, ay = –g
Кезінде равноускоренном тік сызықты қозғалыстағы дененің жылдамдығы келесі формуламен анықталады
υ = υ0 + at.
(*)
Бұл формулада υ0 жылдамдығы дененің t = 0 (бастапқы жылдамдығы), a = const – үдеу. Кестеде жылдамдығы υ (t) бұл тәуелділік түрі бар сызық (сур. 1.4.2).
Сурет 1.4.2.
Кестесі жылдамдығын равноускоренного қозғалыс
Бойынша көлбеуге үйді графика жылдамдығы анықталуы мүмкін жеделдету a дене. Тиісті құру орындалды, күріш. 1.4.2 үшін графика I. Жеделдету сан жағынан тең қатысты тараптардың үшбұрыштың ABC:
Көп бұрыш β құрайтын кестесі жылдамдығы с-осі уақыты, т. е. көп еңкіштігі графика (тау), көп жеделдету дене.
Графика үшін I: υ0 = -2 м/с, a = 1/2 м/с2.
Графика үшін: υ0 = 3 м/с, a = -1/3 м/с2.
Модель. Жылдамдық және үдеу
Кестесі жылдамдығын мүмкіндік береді, сондай-ақ анықтау жобаларына жатады ауыстыру s, денені біраз уақыт t. Қаржы бөлеміз осіне уақытты біршама шағын уақыт аралығы Δt. Егер осы уақыт аралығы жеткілікті мал болса, өзгерту жылдамдығын осы аралықта көп емес, т. е. қозғалысы осы уақыт аралығында есептеуге болады біркелкі байланысты кейбір орташа жылдамдықпен тең сәттік жылдамдығы υ дененің ортасында аралығын Δt. Яғни, Δs орын ауыстыруы кезінде Δt тең болады Δs = υΔt. Бұл ауыстыру сияқты алаңда заштрихованной жолақтар (сур. 1.4.2). Разбив уақыт аралығы 0-ден біраз уақыттан t шағын аралық Δt аламыз, бұл орын ауыстыруы s үшін берілген уақыт t кезінде равноускоренном тік сызықты қозғалысы сияқты алаңда трапеция ODEF. Тиісті құру орындалуы үшін графика II-сур. 1.4.2. Уақыт t қабылданды тең 5,5 с.
Себебі υ – υ0 = at, ақырғы формуласы орын ауыстыру s дененің біркелкі жедел қозғалыс аралықта 0-ден t запишется түрінде:
(**)
Табу үшін y координаттары дененің кез-келген уақыт сәтінде t керек бастапқы координате y0 қосуы ауыстыру үшін t:
(***)
Бұл өрнек деп атайды заңына равноускоренного қозғалыс.
Модель. Кестесі равноускоренного қозғалыс
Талдау кезінде равноускоренного қозғалыс кейде анықтау міндеті ауыстыру дененің берілген мәндеріне бастапқы υ0 және соңғы υ жылдамдық және жеделдету a. Бұл міндет шешілуі мүмкін теңдеулер көмегімен жазылған жоғары алып тастау арқылы, соның ішінде уақыт t. Нәтиже түрінде жазылады
Осы формулалар алуға болады өрнек анықтау үшін ақырғы жылдамдығы υ дене, егер белгілі бастапқы жылдамдығы υ0, үдеу a және орын ауыстыру s:
Егер бастапқы жылдамдығы υ0 нөлге тең, бұл формулалар қабылдайды түрі
Жөн тағы бір рет назар аудару болса, бұл кіретін формулаларды равноускоренного түзу сызықты қозғалыс шамасын υ0, υ, s, a, y0 болып табылады шамалар алгебраическими. Нақты түріне байланысты қозғалыс әрқайсысы осы шамаларды қабылдай алады оң және теріс мәндер.
Негізгі формулалар және кинематикалық сипаттамалары
Жеделдету \overline{a}=const (модулі және бағыты бойынша).
Жылдамдығы дененің заң бойынша өзгереді
\[\overline{v}={\overline{v}}_0+\overline{a}t\]
онда {\overline{v}}_0-бастапқы қозғалыс жылдамдығы.
Заң қозғалыс жағдайда равноускоренного қозғалыс түрлері бар:
\[\overline{r}={\overline{r}}_0+{\overline{v}}_0t+\frac{\overline{a}t^2}{2}\ \]
мұндағы \overline{r}- радиус-вектор нүктесі кезінде уақыт t, \overline{r}_0 – радиус-вектор бастауыш ережелері нүкте, {\overline{v}}_0 бастапқы жылдамдығы, \overline{a}-үдеу.
“Одномерном жағдайда заң қозғалыс запишется түрінде:
\[х=x_0+v_{0x} ‘ t+\frac{a_xt^2}{2}\ \]
Үшін екі өлшемді жағдай (қозғалу жазықтығы бойынша) қозғалысының заңы жағдайда равноускоренного қозғалыс запишется жүйесі түрінде екі теңдеулер:
\[\left\{ \begin{array}{c} x=x_0+v_{0x} ‘t+\frac{a_xt^2}{2} \\ y=y+v_{0y}’ t+\frac{a_yt^2}{2} \end{array} \right.\]
Сондай-ақ, әділетті деп аталатын анықтау үшін формула жолында “уақыт”:
\[, s=\frac{v^2-{v_0}^2}{2a}\ .\]
Бақылау жұмыстары тапсырыс
Шешеміз бақылау барлық пәндер бойынша. 10 жыл тәжірибесі! Бағасы 100 руб мерзімі 1 күннен!
Онлайн заказЦены мен мерзімдері
Тез арада шешуге болады?
Шешеміз міндеттері кез-келген қиындықтағы 1-күн! Арзан және дәл мерзімінде. Заказывай!
Біздің услугиБыстрый тапсырыс
Графикалық кескіндеме байланысты кинематикалық сипаттамаларының уақыт бойынша ұсынылған суреттерде 1-3.
Сур.1. Тәуелділігін жеделдету уақыты кезінде равноускоренном қозғалысы
Сур.2. Зависимость скорости от времени при равноускоренном қозғалысы: а) заң жылдамдығын өзгерту үшін әр түрлі жағдайларды; б) анықтау жылжыту арқылы кестенің жылдамдығы.
Сур.3. Тәуелділік орын ауыстыру уақыты кезінде равноускоренном қозғалысы.
– Сур.1 бейнеленген тәуелділік кестесі жеделдету уақыты кезінде равноускоренном қозғалысы. Оқиға a>0 сәйкес келеді равноускоренному қозғалысы, оқиға a
– Сур.2 ұсынылды зависимость скорости от времени при равноускоренном қозғалысы. Сур.2 (а) көрсетеді әр түрлі жағдайға қозғалыс: 1 – денесі двигалось бағытында осінің x равноускоренно; 2 — дене двигалось равнозамедленно бағытында осі x, содан кейін тоқтады және поменяло қозғалыс бағыты; 3 – дене двигалось равноускоренно бағытта, қарама-қарсы осіне x, содан кейін тоқтап қалды және болды жылжыту қарама-қарсы бағытта. Барлық үш жағдайда денесі алған болса, бастапқы жылдамдығы.
Кесте бойынша жылдамдығын анықтауға болады жеделдету және қозғалыстағы объектісі ретінде тангенс бұрышының тікелей байланысты a(t) x осі.
Алаң заштрихованной трапеция (сур.2 (б)) сан жағынан тең жолдарын, өткізілген денесімен уақытында \Delta t=t_2-t_1\ .
Тәуелділік орын ауыстыру уақыты кезінде равноускоренном қозғалысы — бұл квадраттық функция (сур.3). Ереже шыңдары үш еселі интегралдар байланысты бағыттардың бастапқы жылдамдығы және жеделдету.
Тез арада шешуге болады?
Шешеміз міндеттері кез-келген қиындықтағы 1-күн! Арзан және дәл мерзімінде. Заказывай!
Біздің услугиБыстрый тапсырыс
Бақылау жұмыстары тапсырыс
Шешеміз бақылау барлық пәндер бойынша. 10 жыл тәжірибесі! Бағасы 100 руб мерзімі 1 күннен!
Онлайн заказЦены мен мерзімдері
Мысалдар шешу
1-МЫСАЛ
Тапсырма кесте Бойынша байланысты a_x(t), изображенному-суретте, графигін салу байланысты v_x(t) деп есептеп, бастапқы уақытта (t=0) қозғалыс жылдамдығы материялық нөлге тең болады.
Кезде шешім равноускоренном қозғалысы жылдамдығы v_x материялық нүкте заң бойынша өзгереді:
\[v_x\left(t\right)=v_{0x}+a_xt\ \]
Өйткені шарт бойынша міндеттері v_{0x}=0, қайта жазуға болады:
\[v_x\left(t\right)=v_{0x}+a_xt\ \]
Бірінші учаскеде 0\le t
Бақылау жұмыстары тапсырыс
Шешеміз бақылау барлық пәндер бойынша. 10 жыл тәжірибесі! Бағасы 100 руб мерзімі 1 күннен!
Онлайн заказЦены мен мерзімдері
Тез арада шешуге болады?
Шешеміз міндеттері кез-келген қиындықтағы 1-күн! Арзан және дәл мерзімінде. Заказывай!
Біздің услугиБыстрый тапсырыс
2-МЫСАЛ
Тапсырма тас жолда бір старт аралықпен 2-бастық алдымен велосипедші, содан кейін мотоцикл. Старттан кейін велосипедші бірқалыпты қозғалып жылдамдығы 32 км/сағ, ал мотоциклші — равноускоренно үдеуімен 2,5 м/с ^{2}. Анықтау жылдамдығы мотоциклиста, сол кезде ол жетті велосипедистер.
Шешімі 1) Талдау әдісі.
Деп санаймыз тас прямолинейным. Запишем қозғалыс теңдеуі велосипедистер. Өйткені велосипедші бірқалыпты қозғалып, онда оның қозғалыс теңдеуі:
\[x_1\left(t\right)=v_1t\]
(координаталардың басталуы-помещаем нүктесі старт, сондықтан бастапқы координатасы велосипедистер нөлге тең).
Мотоцикл қозғалып равноускоренно. Ол сондай-ақ бастаған қозғалыс орнынан старт, сондықтан оның бастапқы координатасы нөлге тең, бастапқы жылдамдығы мотоциклиста сондай-ақ, нөлге тең болады (мотоцикл бастады қозғалу жағдайына, тыныштық).
Бұл мотоцикл бастаған қозғалыс \Delta t кейінірек, қозғалыс теңдеуі мотоциклиста:
\[x_2=\frac{a{\left(t-\Delta t\right)}^2}{2}\]
Бұл ретте жылдамдығы мотоциклиста өзгерген заң бойынша:
\[v_2\left(t\right)=at\]
Кезде мотоцикл жүргізушісі қуып жетіп, велосипедистер олардың координаттары тең, т. е. x_1=x_2 немесе:
\[v_1t=\frac{a{\left(t-\Delta t\right)}^2}{2}\ \]
Шеше отырып, бұл теңдеу салыстырмалы t, табамыз барысында:
\[{\left(t-\Delta t\right)}^2=\frac{2v_1}{a} ‘ t;\]
\[t^2-2\Delta t\cdot t+\Delta t^2-\frac{2v_1}{a}t=0;\]
\[t^2-2\left(\frac{v_1}{a}+\Delta t\right)t+\Delta t^2=0;\]
Бұл квадрат теңдеу. Анықтаймыз дискриминант:
\[D=4{\left(\frac{v_1}{a}+\Delta t\right)}^2-4\Delta t^2=4\frac{{v_1}^2}{a^2}+8\frac{v_1\Delta t}{a}+4\Delta t^2-4\Delta t^2=4\frac{v_1}{a}\left(\frac{v_1}{a}+2\Delta t\right);\]
Анықтаймыз тамыры:
\[t_1=\frac{2\left(\frac{v_1}{a}+\Delta t\right)+2\sqrt{\frac{v_1}{a}\left(\frac{v_1}{a}+2\Delta t\right)}}{2}=\frac{v_1}{a}+\Delta t+\sqrt{\frac{v_1}{a}\left(\frac{v_1}{a}+2\Delta t\right)};\]
\[t_2=\frac{v_1}{a}+\Delta t-\sqrt{\frac{v_1}{a}\left(\frac{v_1}{a}+2\Delta t\right)};\]
Подставим бұл формуланың сандық мәндері және вычислим:
\[t_1=\frac{8,9}{2,5}+2+\sqrt{\frac{8,9}{2,5}\left(\frac{8,9}{2,5}+2\cdot 2\right)}=10,75 c\]
\[t_2=\frac{8,9}{2,5}+2-\sqrt{\frac{8,9}{2,5}\left(\frac{8,9}{2,5}+2\cdot 2\right)}=0,37 c\]
Екінші түбірі отбрасываем ретінде келмейтін жеке жағдайларына міндеттері: мотоцикл алмады қуып велосипедистер арқылы 0,37 кейін басталған қозғалыс велосипедистер, өйткені өзі покинул нүктесін басталғаннан 2 с кейін басталды велосипедші.
Осылайша, уақыт мотоцикл қуып жетіп, велосипедистер:
\[t_m=10,75 c\]
Подставим бұл мәні уақыт формуласына заңының жылдамдығын өзгерту мотоциклиста және табамыз мәні оның жылдамдығы осы сәтте:
\[v_2\left(t_m\right)=v_2\left(10,75\right)=2,5\cdot 10,75=26,9\ m/c \]
2) Графикалық тәсілі.
Бір координаталық жазықтыққа саламыз өзгеру графигі уақыт өте келе координаттар велосипедистер мен мотоциклиста (график үшін координаттар велосипедистер — қызыл түспен, мотоциклиста — жасыл). Көрініп тұр тәуелділігі координаттары уақыт үшін велосипедистер — сызықтық функция, графигі осы функция — тікелей (жағдай бірқалыпты түзу сызықты қозғалыс). Мотоцикл қозғалып равноускоренно, сондықтан тәуелділігі координаттары мотоциклиста уақыты — квадраттық функция кестемен болып табылады, және парабола.
Координатасы уақыт қиылысу нүктесін графика — бұл отан ” велосипедистер мен мотоциклиста t_m.
Кестесі уақытына байланысты координаттар велосипедистер мен мотоциклиста:
Бұдан әрі құрамыз кестесі тәуелділіктері мотоциклиста уақыт v_2(t). Осіне (көлденең осі) табамыз белгі t_m=10,75\ c, салудамыз перпендикуляр қиылысына дейін кестесіне (көк пунктир), және осы нүкте опускаем перпендикуляр тік осі (көк пунктир). Қиылысу нүктесі осы перпендикуляр осі тік және бізге мәні жылдамдықтың уақыт t_m, т. е. кезде мотоцикл жүргізушісі қуып жетіп, велосипедистер.
Кестесі уақытына байланысты жылдамдықты мотоциклиста:
Жауап Жылдамдығы мотоциклиста, сол кезде ол жетті велосипедистер болады 26,9 м/с.